
As quadrotors take on an increasingly diverse range of roles, researchers often need to develop new hardware platforms tailored for specific tasks, introducing significant engineering overhead. In this article, we introduce the UniQuad series, a unified and versatile quadrotor hardware platform series that offers high flexibility to adapt to a wide range of common tasks, excellent customizability for advanced demands, and easy maintenance in case of crashes. This project is fully open-source at https://hkust-aerial-robotics.github.io/UniQuad/.
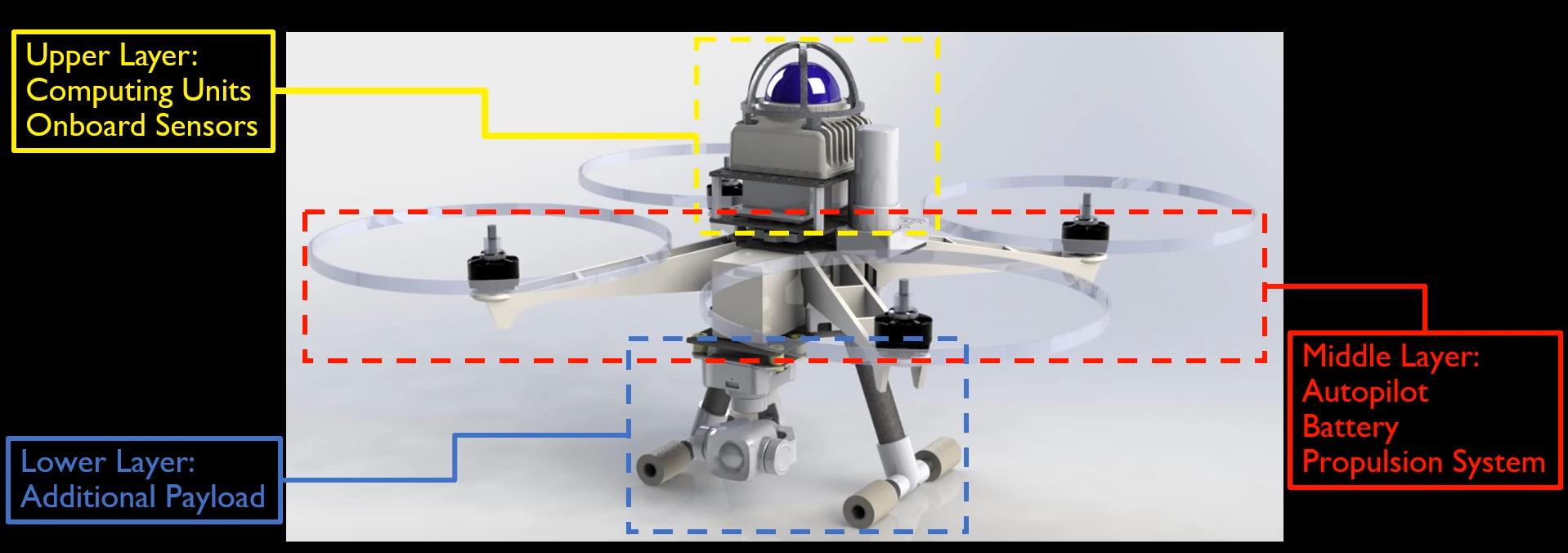
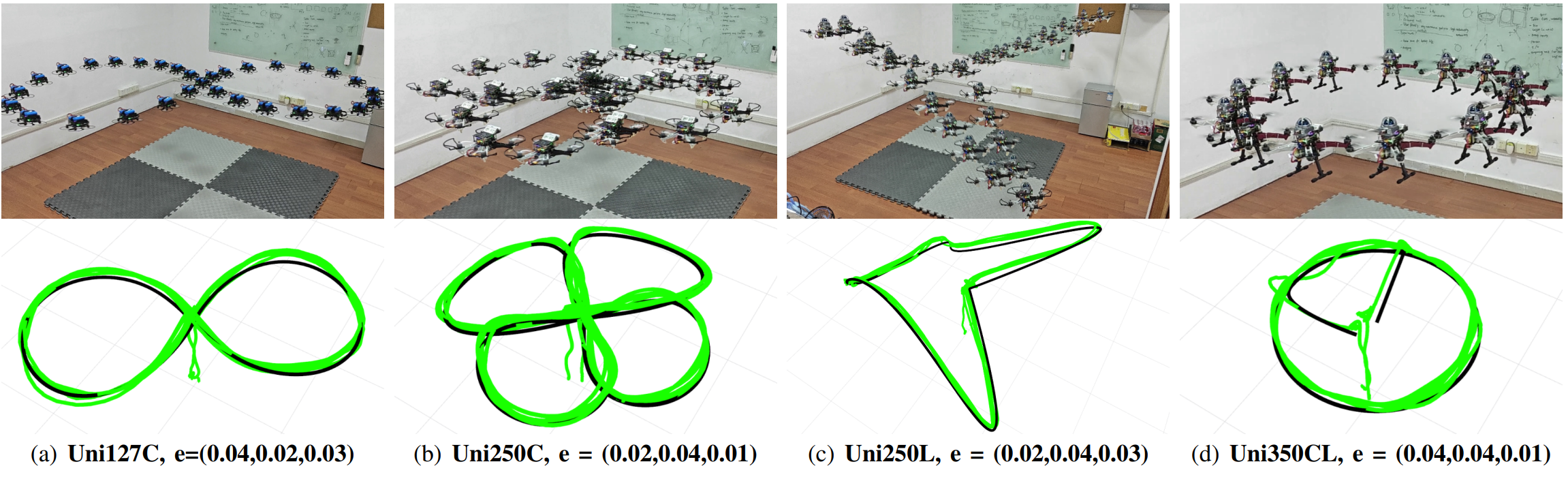
The UniQuad series consists of four quadrotor platforms, namely Uni250L, Uni127C, Uni350CL, and Uni250C. These platforms are designed to cover a wide range of applications, from indoor navigation to outdoor mapping. The UniQuad series is equipped with various sensors, including RTK, Intel RealSense D430, D435, and Livox LiDAR Mid-360, to provide accurate and reliable data for different tasks.
| Model | Wheelbase | Motor* | Propeller | Weight | Battery Capacity | Equipped Sensor | TWR** | Flight Duration |
|---|---|---|---|---|---|---|---|---|
| UNI-127C | 127mm | F1404 KV3800 | Gemfan 3016 | 468g | 4S 3000mAh 30C | Intel RealSense D430 | ≅2.77 | 7min |
| UNI-250C | 250mm | F60PRO KV2550 | Gemfan 5043 | 848g | 4S 2200mAh 45C | Intel RealSense D435 | ≅7.03 | 8.5min |
| UNI-250L | 250mm | F60PRO KV1750 | Gemfan 5043 | 1258g | 6S 3300mAh 50C | Livox LiDAR Mid-360 | ≅5.46 | 12min |
| UNI-350CL | 350mm | F90 KV1300 | Sunnysky EOLO8 | 1526g | 6S 3300mAh 50C | D435 & Mid-360 | ≅5.54 | 15.5min |
*All motors are purchased from T-MOTOR (https://store.tmotor.com/categorys/f-series-motor).
**Thrust-to-weight ratio (TWR) is calculated using data obtained from the motor test report available on the T-MOTOR official website.
@article{zhang2024uniquad,
title={UniQuad: A Unified and Versatile Quadrotor Platform Series for UAV Research and Application},
author={Yichen Zhang and Xinyi Chen and Peize Liu and Junzhe Wang and Hetai Zou and Shaojie Shen},
journal={arXiv preprint arXiv:2407.00578},
year={2024},
}


